Dynamic LLM-Agent Network
在综述里看到的,介绍 Agents Communication 的结构 “Layered” 里提到的文章。
https://arxiv.org/abs/2310.02170
https://github.com/SALT-NLP/DyLAN.
Abstract
集成多个 LLM agent 可以进一步提高性能。文章提出了一个智能体决策团队,基于 query 在 动态交互 的架构中交流。构建了一个 Dynamic LLM-Agent Network (DyLAN) **,用于 agent 在复杂任务上的协作。agent 在动态架构中进行 **多轮交互,有 inferencetime agent selection and an early-stopping mechanism 来提高表现和效率。设计了一个基于 Agent Importance Score
的智能体团队自动优化算法,基于每个智能体各自的贡献来选择最佳智能体集合。
Introduction
现有的:在一个团队中组合不同的 agent 来处理同一个询问,来解决复杂的任务,往往是静态的为每个 agent 设置预定义好的角色。
存在的问题:
- 手动设置智能体的角色,使它很难推广于其他领域和任务;
- 智能体以固定顺序生成答案,可能导致 sensitivity;
- 需要很强的人类经验,而且可能和实际情况不符。
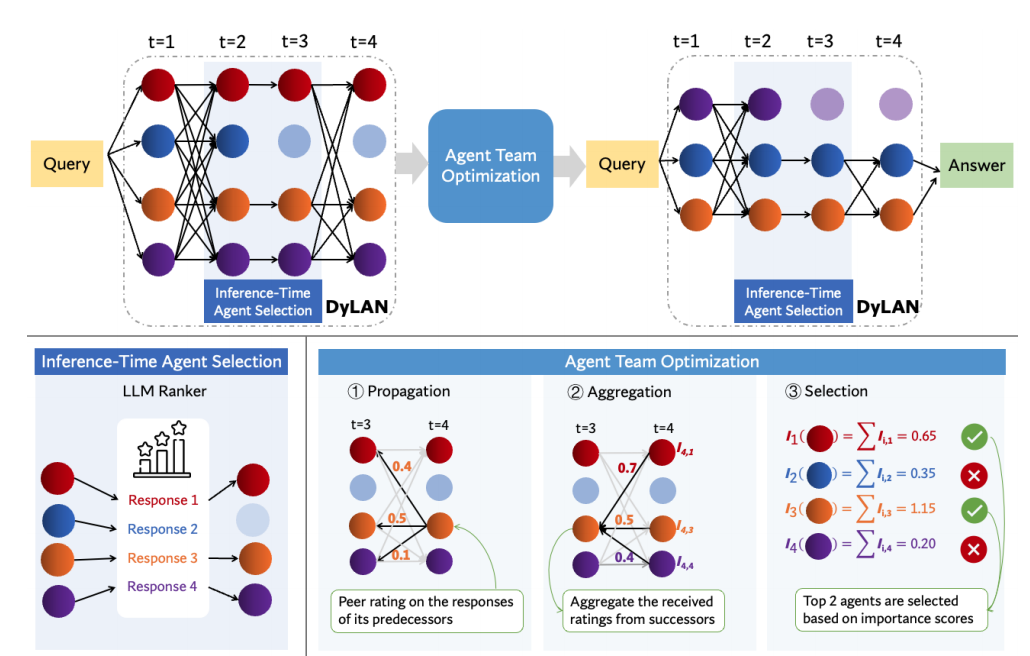
DyLAN:用前馈网络来制定每个任务的协作过程,把不同 time step 的 LLM 视为 节点,不同 time step 的消息交换作为 边,这样把多轮 agent 协作组织成了一个多层网络。用了一个 LLM-empowered ranker 对不同的 agent 排序,并 在之后的交互中停用表现不佳的 agent(inference-time agent selection),从而构建了一个动态的交互结构。同一层的 agent 达成共识时终止推理过程(early-stopping mechanism),保证效率。提出了不需要人工的自动优化方法,为了选择 top-k 智能体,有三步:每个智能体对它前面的解决方案打分(propagation);汇总它们后继的打分,量化评分(aggregation),总结所有 time step 的评分,为每个智能体生成一个 Agent Importance Score;根据这个得分来选择(selection)。
Related Work
咕咕咕
Dynamic LLM-Agent Network
FORMULATION
节点:节点是在特定 time step 的智能体,智能体接收其它智能体在上一个 time step 生成的内容,把它作为输入,并生成响应。$a_{t,i}$ 表示第 i 个智能体在第 t 个 time step,可以看作是一个输入是 prompt, q, 前一个时间节点的所有前驱的输出集合的函数。
- 边:多智能体写作过程中,每个节点之间的通信。边有向,且只能从 t-1 到 t。
- 消息传递:引导信息流通过前馈网络中的节点和边。两种类型的消息传递:前向传递,跨 time step 向特定的智能体传递消息,系统生成最终答案;反向传递,这个 Agent Importance Score,是沿着反向边来传递分数。
CONSTRUCTION OF DYLAN
- 在 middle time step 中增加 inference-time agent selection
- 在适当的层级终止推理
层:同一个 time step 上工作的一组 agent。在每一层中,每个节点接收 来自前一层(上一个 time step)的所有节点 的响应。这种通信在层之间形成边,比如图 1,询问被发送到第一层的节点。
inference-time agent selection:在第 L 层选择 top-m 响应来前馈,用一个 LLM-Ranker 来分析前一层的响应并且打分评价,被识别为无用的智能体在之后的层被停用。
early-stopping mechanism:在单层中超过 2/3 的智能体答案一致时,推理过程被终止(达到最大 time step 的时候也终止),把这个机制用在了每一层。
AGENT TEAM OPTIMIZATION
把图简化成一个更小的图。
- Propagation:要求每个节点对前一个节点的响应打分
- 每个节点汇总他的后继节点对他的评价(反向传递),在不同的 time step 里量化他自己的贡献
- 总结同一个智能体在不同步骤的得分,根据这些得分,提取出贡献最大的 top-k 智能体
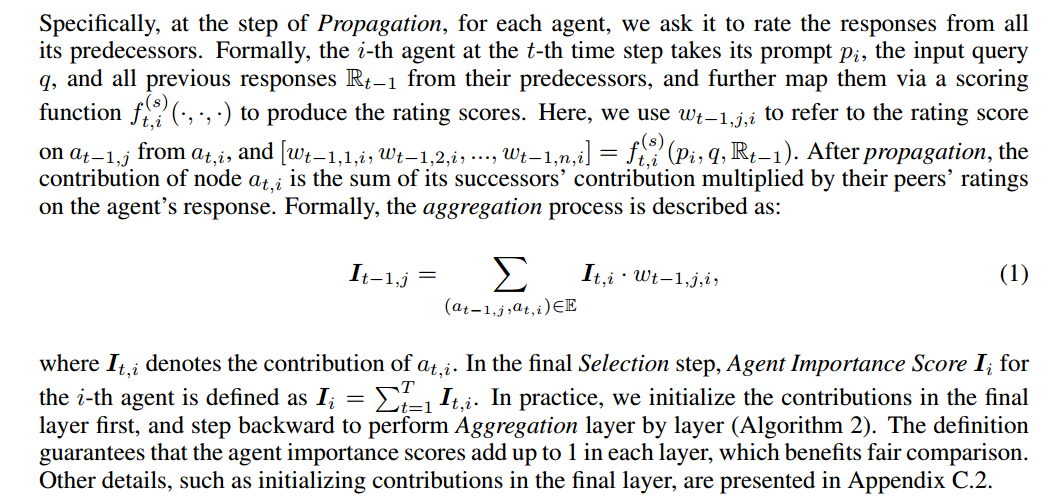
$a_{t-1,j}\rightarrow a_{t,i}$,计算 $a_{t-1,j}$ 的贡献,先找他的后继,求它的后继的贡献与这个后继对他的打分的乘积,求总和。(应该做了归一化)
在最后一层初始化贡献,然后反向传递。